Control and Analysis of Stochastic Systems Lab
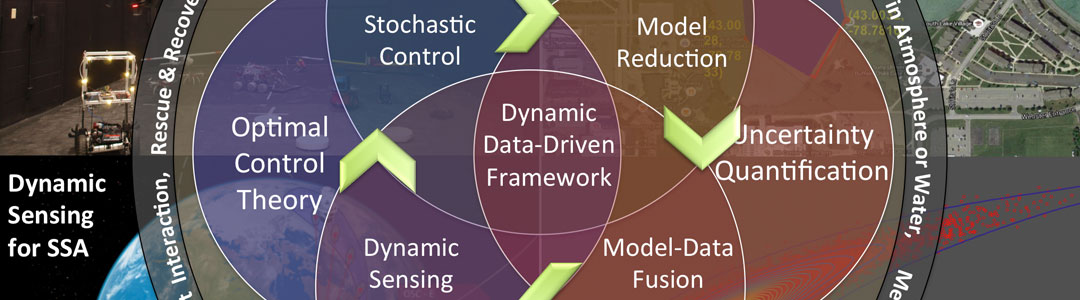
The research activities in the Control and Analysis of Stochastic Systems (CASS) Lab primarily focus on the development of a computationally tractable dynamic data driven framework to address challenges associated with accurate modeling, forecasting, and control of engineering systems under uncertainty.
These research challenges include developing non-parametric models from data, characterizing errors associated with models, propagating non-Gaussian uncertainties for large scale nonlinear systems, assimilating high dimensional noisy data with forecast model states, and incorporating the next generation of mobile sensors (such as drones) as big data collection and processing units. Hence, the research work at CASS Lab is an amalgamation of fundamental concepts in modeling, sensing, uncertainty analysis, optimal control theory, information theory, and high performance computing.
Researchers at CASS Lab have developed computationally scalable algorithms to solve the Kolmogorov equation to propagate probability density function through nonlinear system flow, “optimal” quadrature methods to propagate statistical moments through system dynamics and efficient collocation methods to solve the Hamilton-Jacobi-Bellman (HJB) equation to derive optimal feedback control laws. We have contributed towards the development of adaptable, robust, and computationally efficient, multi-resolution approximation algorithms based on the direction dependent Radial Basis Function and the Global-Local Orthogonal MAPping (GLOMAP) approaches.
These algorithms have laid the scientific groundwork for the development of a dynamic data driven framework for diverse problems of varying scales such as tracking resident space objects, optimal and robust control of autonomous systems, accurate prediction of toxic material plumes through the atmosphere or water, structural health monitoring of transport infrastructure, tumor motion modeling for conformal radiation therapy, geo-magnetic field survey, terrain approximation, and modeling human-machine interactions.
Key Faculty: Puneet Singla
Facilities and Labs
- Adverse Environment Rotor Test Stand
- Aeroacoustics Facilities
- Air Vehicle Intelligence and Autonomy Lab
- Control and Analysis of Stochastic Systems Lab
- High-performance Computing Cluster Facility
- Indoor Flight Research Lab
- Robot Ethics and Aerial Vehicles Lab
- Rotorcraft Flight Simulator Facilities
- Sailplane Lab
- Space Propulsion Lab
- Structures Labs
- Student Space Programs Lab
- Turbomachinery Aero-Heat Transfer Lab
- Water Channel/Water Tunnel
- Wind Tunnels
- Wind Turbine Field Test Facility