
Rotorcraft Flight Simulator Facilities
VLRCOE Fixed-base Flight Simulator Lab
The Penn State Vertical Lift Research Center of Excellence (VLRCOE) Fixed-base Flight Simulation Laboratory, located in 206 Engineering Unit C, is an engineering simulation environment primarily used for research on rotorcraft flight dynamics, flight control design, and handling qualities. In addition, this facility is used for educational activities, where students and visitors get a feel for the control response and stability characteristics of a rotorcraft. For student researchers, the system provides hands-on experience with a mid-fidelity fixed-base simulator similar to those used for engineering development, system integration, or training at a rotorcraft OEM or government laboratory.
As a research facility, the simulator allows graduate student researchers to develop advanced control systems, dynamic models of advanced rotorcraft configurations, or new pilot interfaces and then test them in a realistic simulation environment with actual rotorcraft pilots. Penn state has developed a tool where students design highly augmented control systems in MATLAB/SIMULINK, such that the controller can be rapidly integrated in a high-fidelity non-linear simulation model, and then tested in virtual flight with a pilot at the stick. Pilots can perform evaluation maneuvers and provide handling qualities ratings to judge the potential benefits of the controllers.
The simulator was built off of the XV-15 simulation cab donated to Penn State by Bell Helicopters in 2006. Subsequently, funds from the U.S. Navy Defense University Research Instrumentation Program (DURIP) and the VLRCOE were used to develop the full facility. Since 2007, the facility has helped draw over $7M in external research funds.
View our research projects that have made direct use of the VLRCOE Fixed-base Simulator.
Facility Description
The simulator cab is from the historic XV-15 tilt-rotor aircraft. This aircraft was the experimental predecessor to the V-22 Osprey. Only two prototypes of the aircraft were built and flown. Aircraft N703NA currently resides in the Udvar-Hazy Center Smithsonian museum near Dulles Airport. Aircraft N702NA was damaged in an accident during testing. The cockpit was salvaged and converted to a flight simulator cab at Bell Helicopter, and the cab now resides at Penn State. The cab features conventional helicopter controls (cyclic, collective stick, and rudder pedals).
In 2012, Penn State installed a new four-channel Control Loading System developed by Simulation Control Technologies, Inc. This system provides fully programmable high bandwidth control loading and reads the pilot stick positions. Cockpit buttons and switches are read through a LabView interface and can be programmed to serve different functions in the Control Loading (e.g. force trim release or beep trim) or Math Model (e.g., control mode selection).
The simulator integrates up to eight different computers on a local network to distribute the computing load, with separate computers providing Image Generation, interface with the control loading system, cockpit instrument displays, and the math model of the rotorcraft dynamics.
The visual system consists of a three-channel high resolution projection system (WSXGA+ native resolution), a 15' diameter by 11'-high cylindrical screen, and image distortion correction and blending. This provides a seamless 170° horizontal field-of-view. The X-Plane Professional flight simulation software is used for Image Generation, with three separate computers driving each visual channel. X-Plane has proven to be highly programmable.
- Plug-in codes allow interface of X-Plane with advanced engineering math models of rotorcraft
- Students researchers have modified the visual database to include moving ship models for simulating
- Mission Task Element (MTE) evaluation courses have been developed to allow controlled handling qualities evaluations by pilots
- Graphical programming has been used to develop Heads-Up Displays
Penn State works with a number of advanced real-time dynamic models of rotorcraft. This includes the GENHEL-PSU non-linear blade element model of the H-60 class helicopter, the FLIGHTLAB advanced simulation modeling tool developed by Advanced Rotorcraft Technologies, and custom-built MATLAB/SIMULINK models developed at Penn State. The math models can typically be run on a single computer, but Penn State has also experimented with distributed computing methods and parallelization of the math model.
Key Faculty: Joseph Horn
Motion-base Flight Simulator Lab (currently under construction)
In 2015, Penn State was awarded a $412K grant from the DURIP titled “Advanced Flight Simulation Facility for Research on Sea-Based Operations of Rotorcraft." These funds are being used to develop a more advanced rotorcraft flight simulation facility which will be used for research on helicopter ship landings, as well as other rotorcraft flight dynamics, controls, and handling qualities topics.
In 2016, Penn State was awarded another grant from DURIP titled “High-Performance Computing System for Real-Time Analysis of Rotorcraft Aeromechanics.” This grant, led by Assistant Professor Sven Schmitz, along with co-Investigators Joseph Horn and Kenneth Brentner, will fund the integration of a high-performance computing system with the flight simulator to allow real-time calculations of high fidelity aeromechanics models.
Facility Description
The simulator is being constructed in Room 17 of Hammond Building. A schematic of the set up shown below.
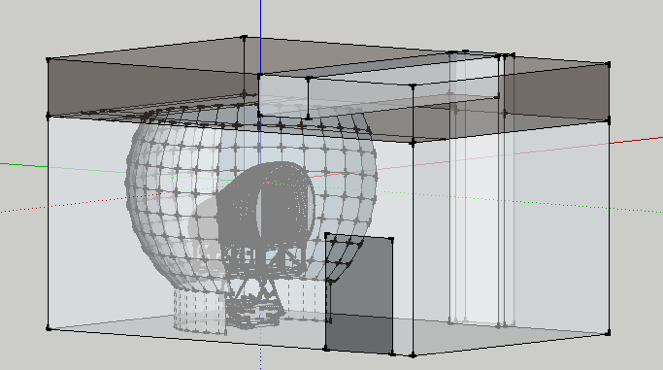
The simulator will feature another cab donated by Bell Helicopters, the BA609 Simulation Cab. The cab will sit on a 6-DOF motion base developed by Servos and Systems Inc. This compact electromechanical motion base provides +/- 30° dege roll / pitch / yaw motion in a compact 1 m3 system. Servos and Systems will also provide the 4 Channel Control Loading System.
Servos and Systems, Inc: Compact 6DOF Motion Base:
The visual system is being developed by project: syntropy, Gmbh from Germany. They have developed the visual system at the Helicopter Simulator at Technical University of Munich (shown below), on which our visual system is modelled. The system will include a six-channel projection system and five-meter diameter spherical screen. This system will provide 210° horizontal field of view and 50° vertical field of view. It will have high-quality auto-calibrated warping and blending system.
Key Faculty: Joseph Horn
Facilities and Labs
- Adverse Environment Rotor Test Stand
- Aeroacoustics Facilities
- Air Vehicle Intelligence and Autonomy Lab
- Control and Analysis of Stochastic Systems Lab
- High-performance Computing Cluster Facility
- Indoor Flight Research Lab
- Robot Ethics and Aerial Vehicles Lab
- Rotorcraft Flight Simulator Facilities
- Sailplane Lab
- Space Propulsion Lab
- Structures Labs
- Student Space Programs Lab
- Turbomachinery Aero-Heat Transfer Lab
- Water Channel/Water Tunnel
- Wind Tunnels
- Wind Turbine Field Test Facility