Exploiting Energy Available in the Environment
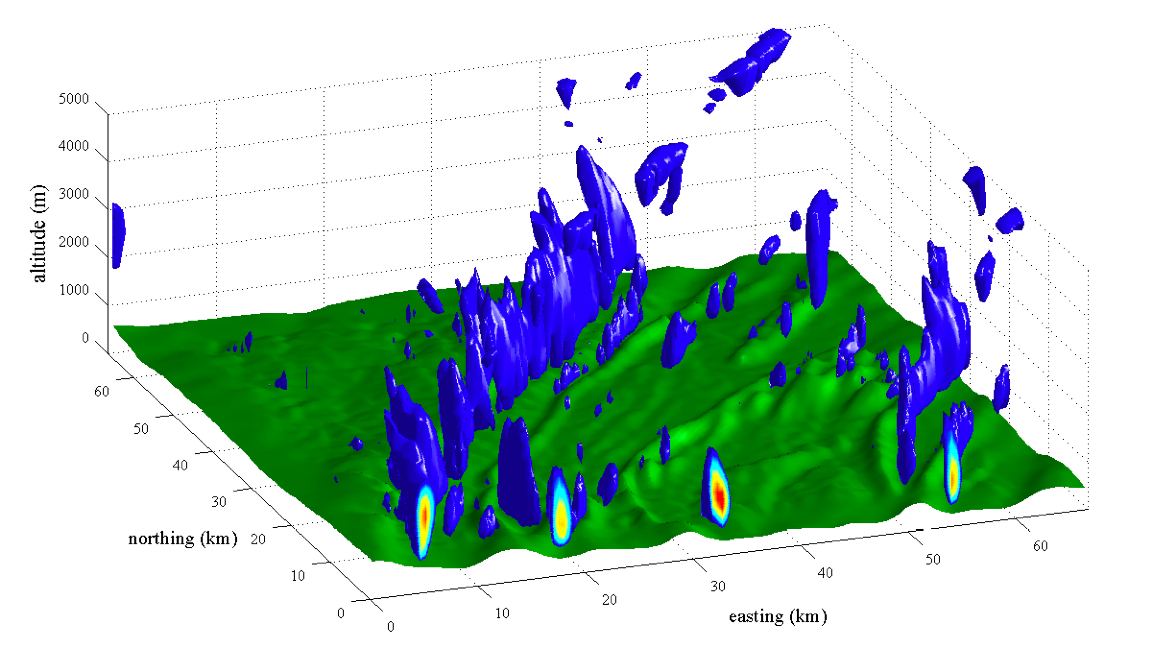
Single frame from video showing simulation the development of atmospheric wave over Central Pennsylvania. [WMV 22Mb]
Small autonomous vehicles are typically limited in the amount of on-board energy storage and in the sensing payload that can be carried. As a result a fundamental trade-off is often made between sensing (to maximize the information gathered on a mission) and fuel (to maximize mission duration). Additionally, small uninhabited aerial vehicles (UAVs) suffer from reduced performance due to generally low operating Reynolds number, which makes design of efficient (i.e. high L/D) aircraft difficult.
In the case of UAVs significant energy is available from the atmosphere. Large birds such as eagles, hawks and vultures routinely employ soaring flight to remain aloft for many hours with flapping wings. The video at right shows the time history of a simulation of nocturnal wave over Central Pennsylvania. Blue isosurfaces bound regions where the vertical windspeed is greater than 0.6m/s, approximately the minimum sink rate of an RnR Products SB-XC glider. Thus a glider can increase its altitude by remaining within the blue regions.
Lord Rayleigh was one of the first researchers to record observations of energy harvesting by birds. He noted that for gliding flight one of three things occurs: (1) the bird steadily loses altitude; (2) there is a vertical component to the wind; (3) the bird is flying in a region where there is a gradient in the wind field. Energy can thus be harvested by exploiting one of three atmospheric phenomena: vertical air motion; spatial gradients in the wind field; and temporal gradients in the wind field (i.e. gusts).
Each of these phenomena operate on different time scales. Vertical air motion (thermals, ridge lift or wave) can last from minutes to days, and kinematic models of aircraft motion are sufficient to develop useful energy harvesting algorithms. Spatial gradients, while also typically long duration, require significant acceleration and higher-order models of aircraft dynamics are required. Typically point mass models are used and a priori knowledge of the wind field is assumed. Temporal gradients (i.e. gusts) are stochastic phenomena with timne scales comparable to high-order vehicle dynamics, and full models of aircraft dynamics are required. Further, because gusts are a stochastic phenomenon we cannot assume a priori knowledge of the wind field.
We are working on trajectory planning algorithms to exploit long-duration phenomena ("static soaring") and control algorithms to enable real-time closed loop energy harvesting from stochastic phenomena ("gust soaring").
For more information please contact me or see the Publications page.
This research is funded by the National Science Foundation under grant number IIS-0746655.
Safe navigation for small autonomous vehicles
Successful navigation through complex, cluttered environments is still a significant challenge for small autonomous vehicles. While large vehicles (such as the automobiles used in the DARPA Urban Challenge) can carry large sensor suites consisting of mulitple cameras, radars and scanning laser rangefinders, small vehicles are limited in size, weight and power requirements.
The advent of small CCD cameras and MEMS inertial measurement units has enabled the use of vision systems for obstacle avoidance and navigation. Building upon earlier work (see old projects) we are now developing methods of local terrain mapping for complex environments using a combination of vision, inertial and GPS measurements. These terrain maps can be used by generic trajectory planning methods to enable safe navigation.
For more information please contact me or see the Publications page.
This research is funded in part by the Applied Research Lab's Exploratory and Foundational Research Program.
Ground-based tracking of migrating raptors using computer vision
Migration places extreme demands on birds as they travel long distances, and ability to conserve energy through the use of atmospheric lift is critical for success. The combination of the long ridges of the Appalachian mountains with strong prevailing North-West winds in Spring and Fall results in extensive regions of orographic (slope) lift, and this is extensively used by migrating raptors. Interference with these Appalachian migration corridors through poor wind farm site selection and design has the potential to greatly affect the survival of the Eastern golden eagle population.
Current methods of tracking raptors include GPS tags, radar, and human observers stationed at observation points along the migration corridor. Each one of these methods provides some information: GPS tags provide 3D position updates approximately every hour, radar provides 2D ground tracks and human observers provide counts of birds and species identification. None of these methods are able to provide detailed information about the 3D flight path (position and velocity) of birds near terrain or obstacles.
We are developing a system to track migrating raptors using an array of ground-based cameras. This will provided detailed 3D tracks (position and velocity) of birds as they fly past the camera array, and will allow us to investigate bird flight techniques and the effect of wind farms on bird flight patterns.
For more information please contact me or see the Publications page.