
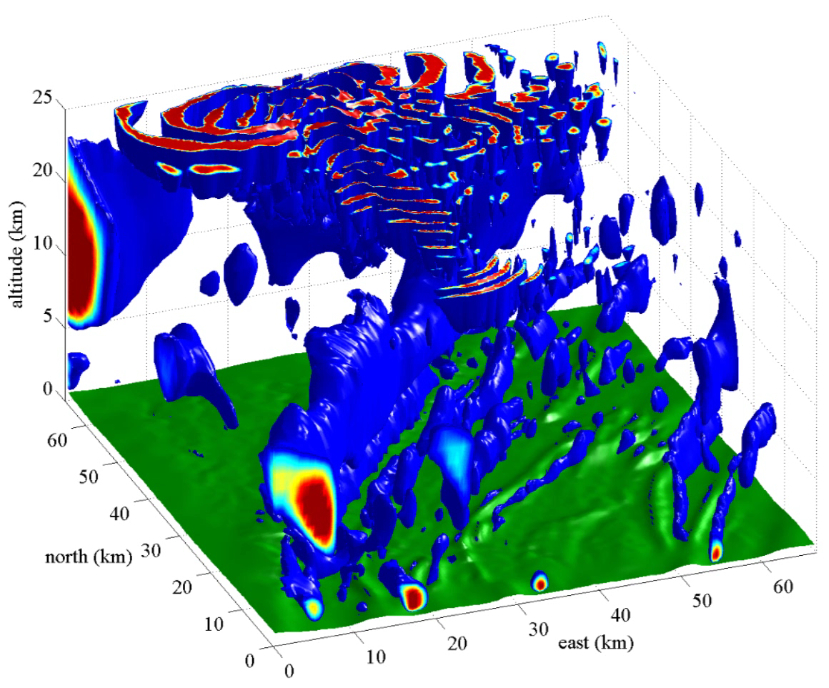
Energy harvesting from Mountain Wave: A video showing the time history of the potential for energy harvesting from mountain wave over Central Pennsylvania. Blue isosurfaces bound regions where the vertical component of the wind is greater than the sink rate of a glider, hence flight within these regions leads to increasing glider total energy. The data was generated using WRF-ARW. Data courtesy George S. Young, Brian J. Gaudet, Nelson L. Seamand and David R. Stauffer, Department of Meteorology, Penn State University. Please see the Research page for more information. [26Mb WMV]
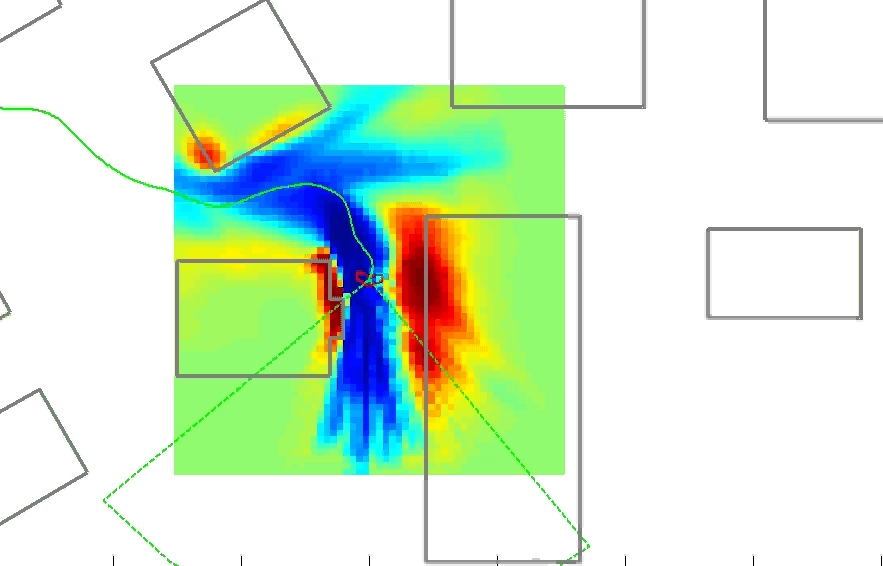
Obstacle avoidance using optical flow and occupancy grids: This video shows a simulation of obstacle avoidance for a small autonomous aircraft. Optical flow is used to populate an occupancy grid (aka evidence grid), which is used to generate steering commands for obstacle avoidance. The occupancy grid serves two purposes: robustness to noisy optical flow measurements and the ability to plan a local trajectory rather than simply using feedback control. See my Research page for more information. [14.5Mb AVI]
Welcome my homepage. My research is primarily concerned with planning and control algorithms to enable high performance autonomy, focused mainly on robotic flight vehicles. My students and I have developed methods to enable autonomous soaring flight, vision-based autonomous landing, and cooperative transport of slung loads by a team of rotorcraft. We design, build, and fly aircraft to test and demonstrate our algorithms: for more details please see the Air Vehicle Intelligence and Autonomy Lab's homepage: AVIA.
My publications are available through the Air Vehicle Intelligence and Autonomy (AVIA) Lab webpage: AVIA/Publications.
Contact me at .
My academic CV is available here.
News
The next NASA New Frontiers mission will be Dragonfly, a mission designed to study the geochemistry and weather of Saturn's moon Titan. Dragonfly is a rotary-wing robotic lander that will fly from one geological site to the next: the combination of low gravity and high atmospheric density makes Titan a great place to fly! Our team is proud to be working with engineers and scientists at Johns Hopkins Applied Physics Lab, NASA research centers, and leading Aerospace companies as we seek to explore an ocean world. The Penn State team is working on rotor design, vehicle aeromechanics, flight performance analysis, aerodynamic design of the lander body, and atmospheric flight optimization. For more information please see the JHUAPL site: Dragonfly.
In 2011 I was team leader of Team Pipistrel-USA.com, winner of the Green Flight Challenge. We flew a 4-seat electrically powered aircraft for 200 miles at 107 miles per hour at an average equivalent fuel efficiency of 403 passenger miles per gallon. Working with the engineers at Pipistrel and our pilots Dave Morss and Robin Reid was insanely rewarding. An overview and links to more details can be found here.
You can find my TEDxPSU talk about the Green Flight Challenge here: TEDxPSU Green Flight Challenge.
Quick Links
Aerospace Robotics Lab (Stanford University)