
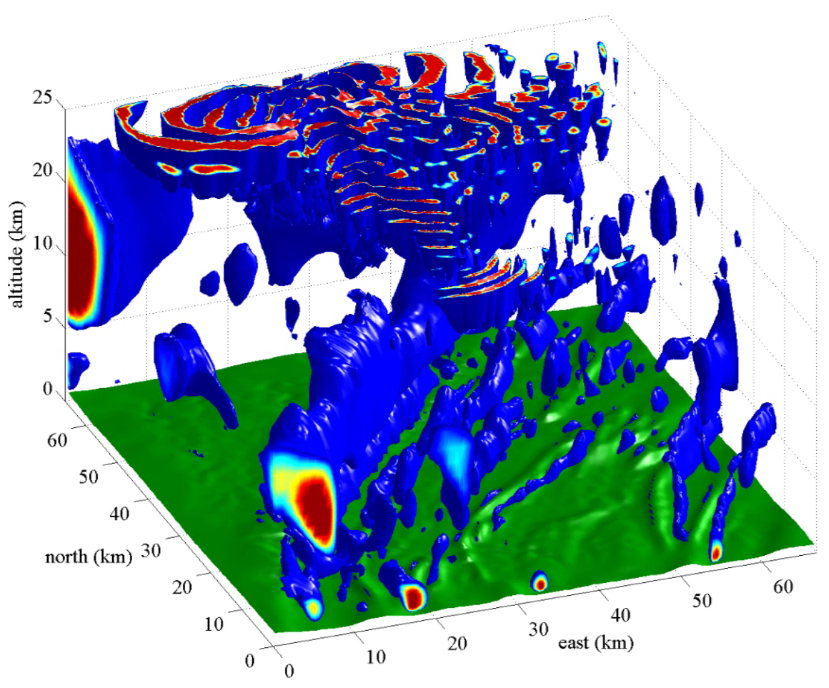
Energy harvesting from Mountain Wave: A video showing the time history of the potential foe energy harvesting from mountain wave over Central Pennsylvania. Blue isosurfaces bound regions where the vertical component of the wind is greater than the sink rate of a glider, hence flight within these regions leads to increasing glider total energy. The data was generated using WRF-ARW. Data courtesy George S. Young, Brian J. Gaudet, Nelson L. Seamand and David R. Stauffer, Department of Meteorology, Penn State University. Please see the projects page for more information. [26Mb WMV]
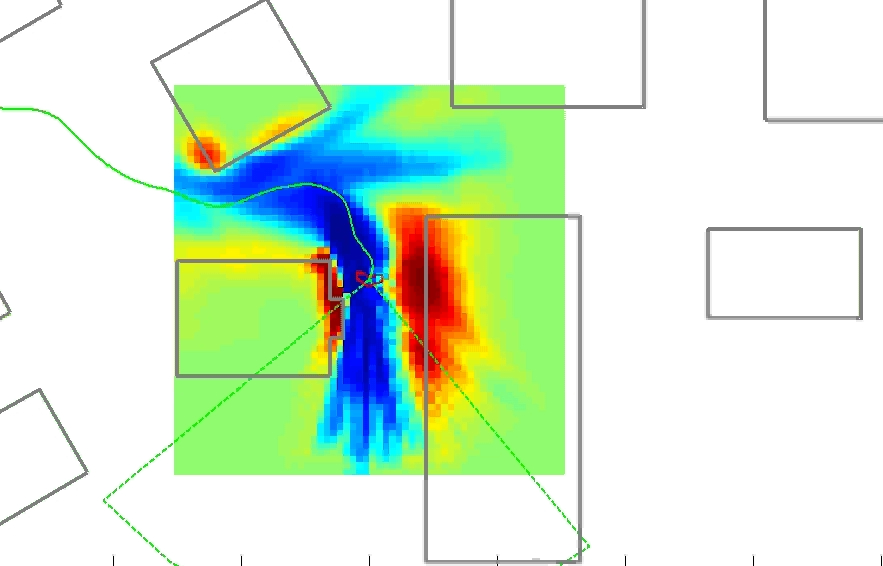
Obstacle avoidance using optical flow and occupancy grids: This video shows a simulation of obstacle avoidance for a small autonomous aircraft. Optical flow is used to populate an occupancy grid (aka evidence grid), which is used to generate steering commands for obstacle avoidance. The occupancy grid serves two purposes: robustness to noisy optical flow measurements and the ability to plan a local trajectory rather than simply using feedback control. See my Projects page for more information. [14.5Mb AVI]
Welcome to the homepage of the Air Vehicle Intelligence and Autonomy (AVIA) Laboratory. The AVIA lab's mission is improving the capabilities of autonomous vehicles by developing algorithms and system designs that address the problems of perception and persistence. Our research focuses on real-world operation: we fly what we design. We have developed and flown:
- algorithms for energy-optimal flight path planning
- algorithms that enable coordinated transport of payloads by a team of autonomous rotorcraft
- vision-based systems for autonomous landing
- design tools for conceptual and preliminary design of both fixed-wing and rotary-wing flight vehicles.
Contact Jack Langelaan at .